|
Sunoh Lee I am a MS student in the Kim Jaechul Graduate School of AI at Korea Advanced Institute of Science and Technology (KAIST), advised by Prof. Seunghoon Hong. My research focuses on high-level intelligent systems designed to navigate and interact with unseen environments. To build such systems, I believe it is essential to develop models that can both deeply understand the world (perception) and realistically anticipate its dynamics (generation). Before joining KAIST, I was a Computer Vision & Robotics researcher at Agency for Defense Development (ADD) in the South Korea , where I researched 2D & 3D Object Detection and instance representation learning in unseen environments for autonomous robots. I completed my bachelor's degree (rank 1/121) in Electrical Engineering and Computer Science at Gwangju Institute of Science and Technology (GIST). Research intersets
✦ Long Video Generation
Email / CV / Google Scholar / LinkedIn |

History✦ 2025.08 ~ | Korea Advanced Institute of Science and Technology (KAIST) - Master• Kim Jaechul Graduate School of AI ✦ 2022.04 ~ 2025.05 | Agency for Defense Development (ADD) - Military Service• Research Officer for National Defense (ROND) ✦ 2018.03 ~ 2022.02 | Gwangju Institute of Science and Technology (GIST) - Bachelor
• Bachelor of Science in Electrical Engineering and Computer Science , Minor in Economics
✦ 2015.03 ~ 2018.02 | Hansung Science High School (HSHS) - High School• High school for talented students in math and science |
Publications(Equal contributions are denoted by *) |
|
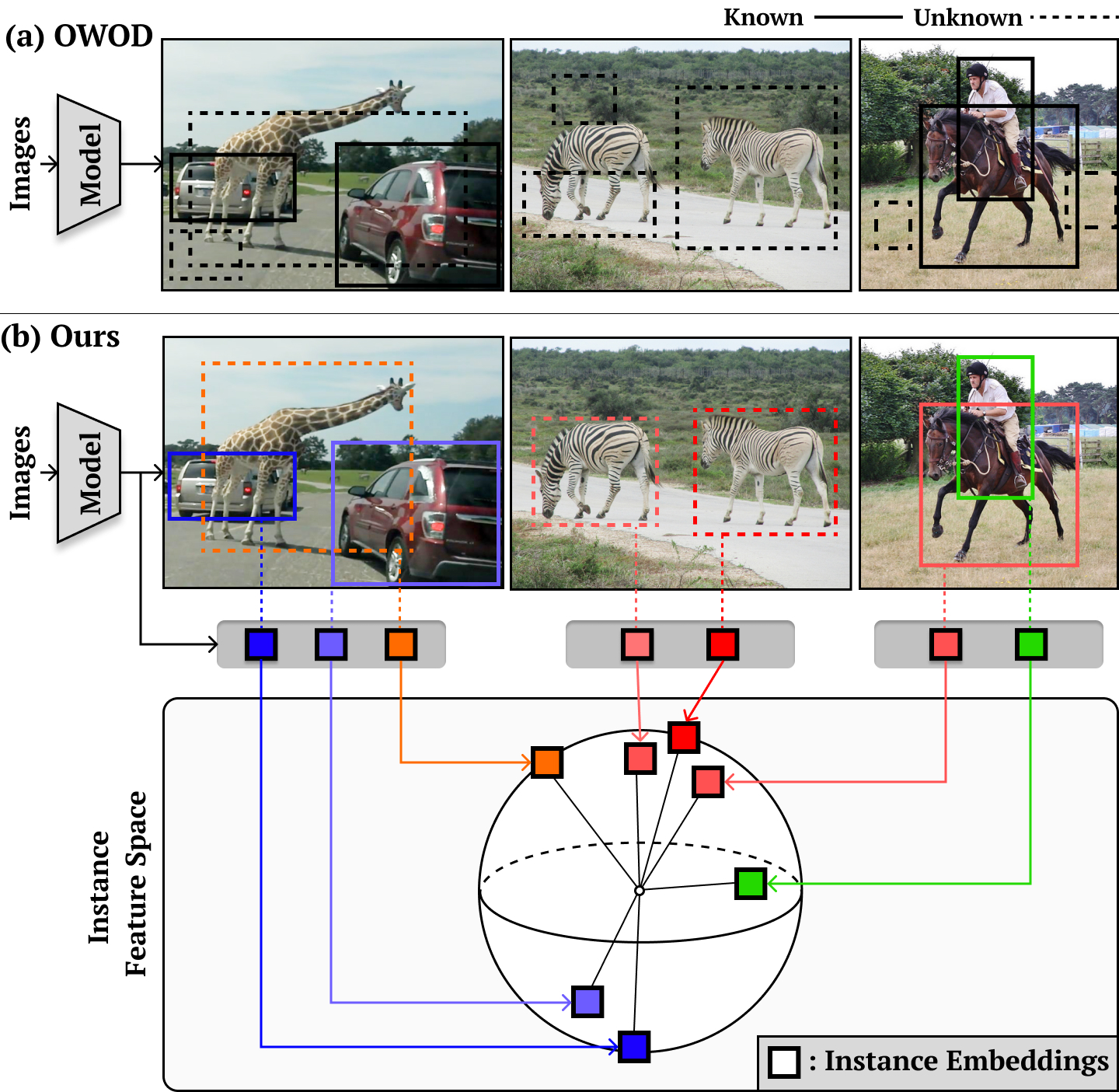
Sunoh Lee*, Minsik Jeon*, Jihong Min, Junwon Seo IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2026. project page / video / arXiv Open-World Object Detection method enhanced by Vision Foundation Models for better detection performance and effective feature similarity recognition among detected instances. |
Projects |

|
Agency for Defense Development, 2024 - 2025 Developed a method to merge detection results, enabling multiple Unmanned Ground Vehicles (UGVs) to cooperate effectively while in motion, based on ROS2. |
|
Agency for Defense Development, 2024 Developed a method to filter moving objects from LiDAR points using the Iterative Closest Point (ICP) algorithm, enabling robust path planning. |

|
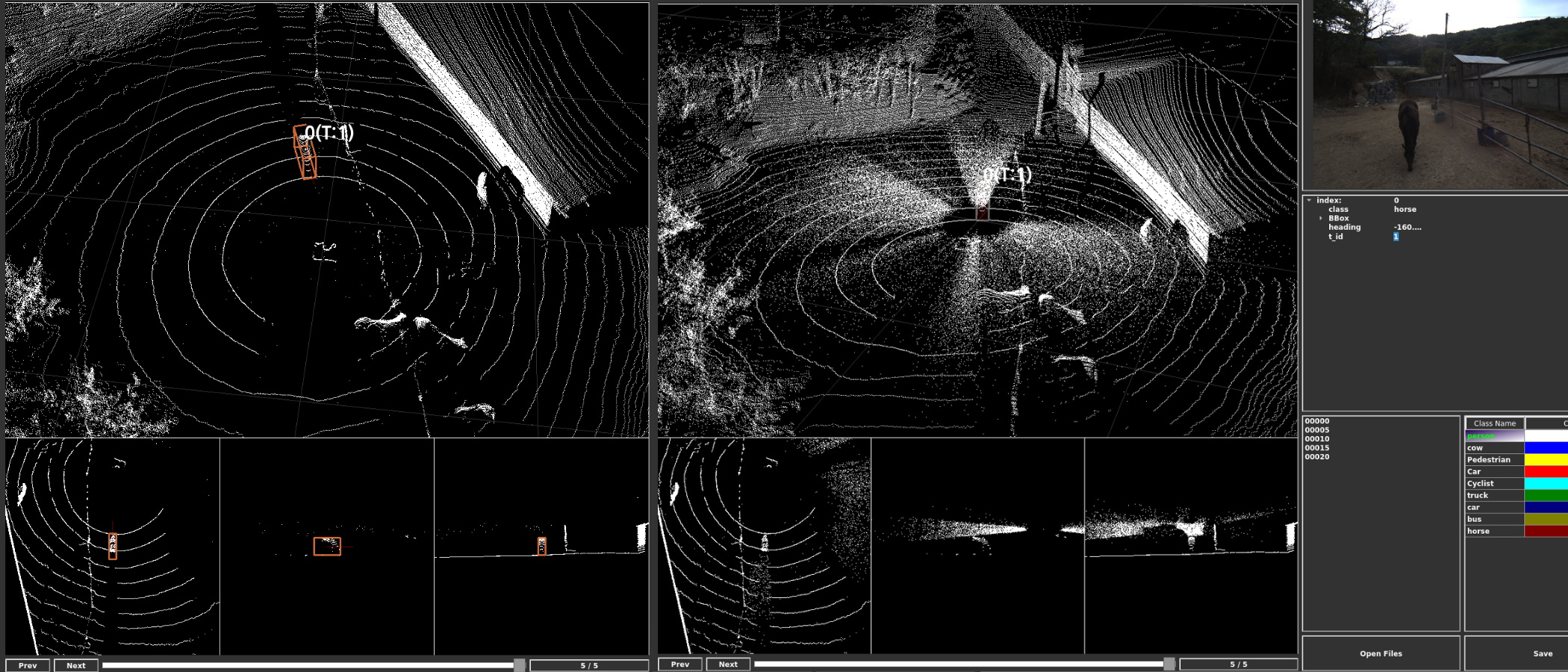
Agency for Defense Development, 2024
Developed an unseen object detection method for autonomous robotic exploration in subterranean environments using an IP-camera and ROS2.
|
|
Agency for Defense Development, 2022 - 2023
Constructed a dataset to enable the detection of deformable objects, such as animals, which may appear in specific environments like off-road terrain, rather than common objects like humans or vehicles.
|
|
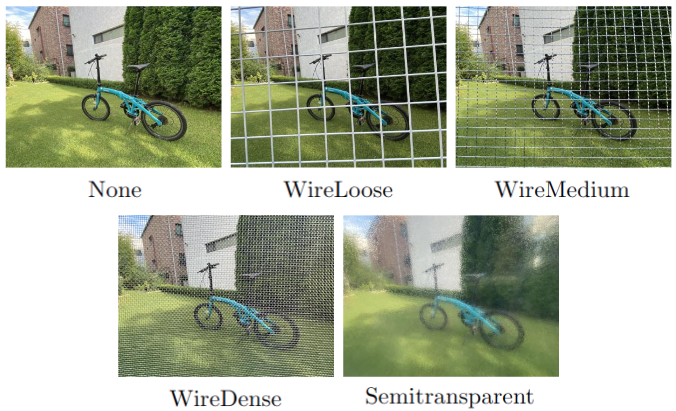
Gwangju Institute of Science and Technology, 2021
Built an image dataset of objects occluded by various types of wires and validated it through object classification and segmentation.
|
|
Design and source code from Jon Barron's website |